Advanced Machine Learning - Introduction to Deep Learning- Week3
This post is a summary for Advanced Machine Learning - Introduction to Deep Learning Course week3 in Coursera.
Introduction to CNN
- Image as a neural network input
- Normalize input pixels: \(x_{norm} = \frac {x} {255} -0.5\)
- MLP couldn’t work because features in different areas don’t work in same model.
- Convolution will help in that case.
- Convolution is a dot product of a kernel and a patch of an image.
- Convolution is similar to correlation
- Convolution is translation equivariant
- if we move the input and apply convolution, it will act the same as if we first applied convolution
- Backpropagation for CNN
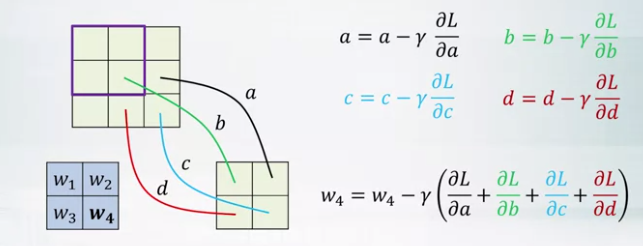
- Gradients of the same shared weight are summed up.
- Convolutional vs fully connected layer
- In convolutional layer, the same kernel is used for every output neuron. Share parameters of the network.
- Fully connected layer where each output is a perceptron.
- ex. 300x300 input, 300x300 output 5x5 kernel, convolutional layer needs 26parameters, \(8.1 x 10^9\) parameters needed in fully connected layer.
- A color image input
- W X H X C tensor
- One convolutional layer is not enough
- We use another convolutional layer above convolutional layer
- In this case, Receptive for nth convolutional layer will be 2n+1 x 2n+1 when 1st convolutional layer cover 3x3.
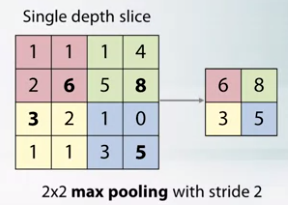
- Pooling layer
- Works like a convolutional layer but doesn’t have kernel.
- It calculates maximum or average of input patch values.
- Backpropagation for max pooling layer
- Maximum is not a differentiable function.
- No Gradient w.r.t to non maximum patch nuerons.
- Change of maximum patch neurons will affect the output.
Modern CNNs
- Sigmoid activation
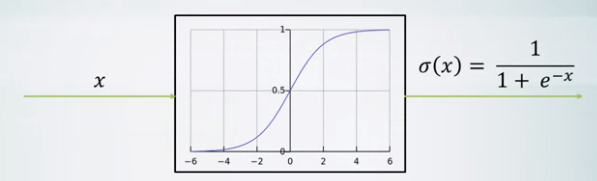
- x for input and \(\frac {1} {1+e^{-x}}\) for output
- If x is too small or too big, it can lead to vanishing gradients.
- Tanh activation
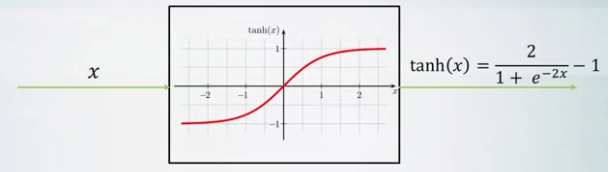
- Zero-centered
- Similar to sigmoid
- ReLU activation
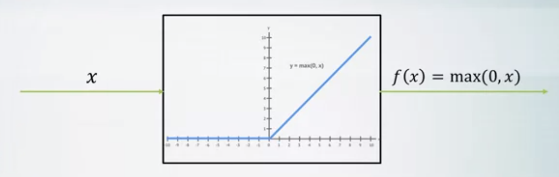
- Fast to compute
- Gradients do not vanish for positive x’s
- Not zero centered
- Can die when x initialized as less than zero
- Leaky ReLU activation
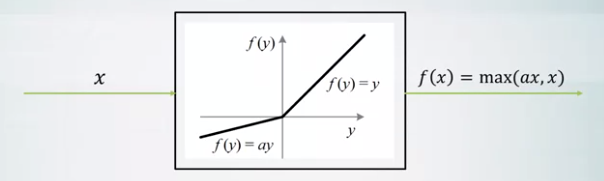
- Will not die.
- Weights initializations
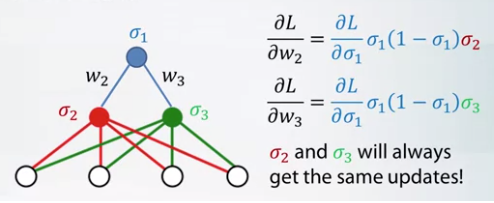
- If we start with all zeros. simga 2 and sigma 3 have same updates.
- We can break with small random numbers.
- If we initialize like \(E(x_i) = E(w_i) = 0\) then the expected value of linear combination is zero.
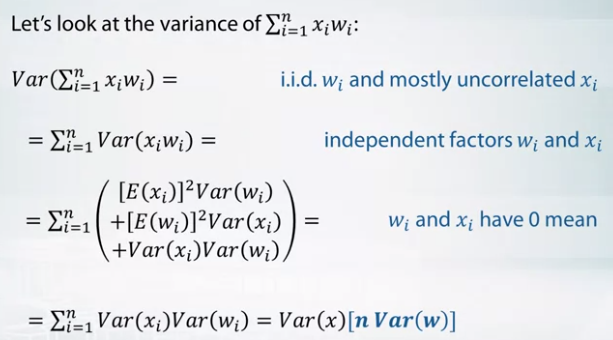
- n Var(w) should be 1.
- If it greater than 1, variance will increase while passing hidden layer.
- Batch normalization
- normalize neuron output before activation
- \(h_i = \gamma_i * \frac {h_i - \mu_i} {\sqrt {\sigma_i^2}} + \beta_i\).
- \(\mu_i = \alpha * mean_{batch} + (1 - \alpha) * \mu_i\).
- \(\sigma_i^2 = \alpha * variance_{batch} + (1 - \alpha) * \sigma_i^2\).
- \(0 < \alpha < 1\).
- Since normalization is a differentiable operation, we can apply backpropagation.
- Dropout
- Reduce overfitting.
- Keep neurons active with probability p.
- During training, all nuerons are present but outputs are multiplied by p.
- Data augmentation
- Since Datasets are not that huge, we apply flips, rotations, color shifts, scaling, etc.
- AlexNet(2012)
- First deep CNN for ImageNet
- 11x11, 5x5, 3x3 convolutions, max pooling, dropout, data augmentation, ReLU activations, SGD With momentum.
- VGG (2015)
- Similar to AlexNet for using convolutions, pooling, etc.
- only 3x3 convolutions but lots of filters.
- Inception V3 (2015)
- Use Inception block.
- Batch Normalization, image distrotions, RMSProp for gradient descent.
- 1x1 convolutions.
- Capture interactions of input channels in one pixel of feature map.
- Reduce the number of channel.
- Basic Inception block.
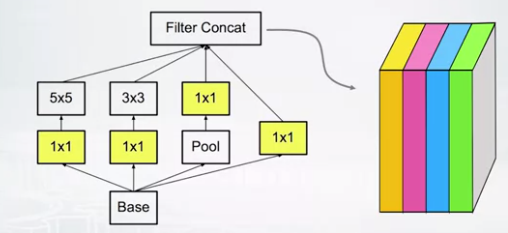
- 4 different feature maps are concatenated on depth at the end.
- We can replace 5x5 convolution to 2 3x3 convolutions.
- Filter decomposition in Inception block
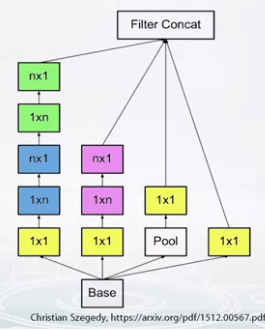
- 3x3 convolutions are expensive parts.
- Replace with 1x3 layer and 3x1 layer.
- ResNet (2015)
- Introduces residual connections
- few 7x7 convolution layers, rest are 3x3 convolution layers. batch normalization, max and average pooling.
- Residual connections
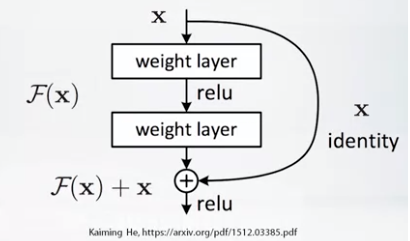
- Create output channels adding a small delta F(x) to original input channels x
- Can stack thousands of layers and gradients do not vanish.
Applications of CNNs
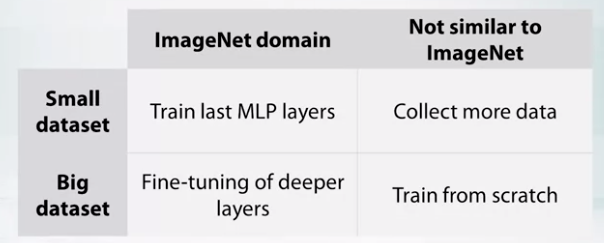
- Transfer learning
- Deep networks learn complex features extractor, so we use it for a new task.
- Less data to train
- Can partially reuse ImageNet features extractor when domains are not realtive to ImageNet dataset. (ex. human emotions)
- Fine-tuning
- Initialize deeper layers with values from ImageNet.
- Don’t start with a random initialization.
- Propagate gradients with smaller learning rate.
-
- Semantic Segmentation
- Need to classify each pixel
- Pooling layer can’t be applied since it works as downsampling images.
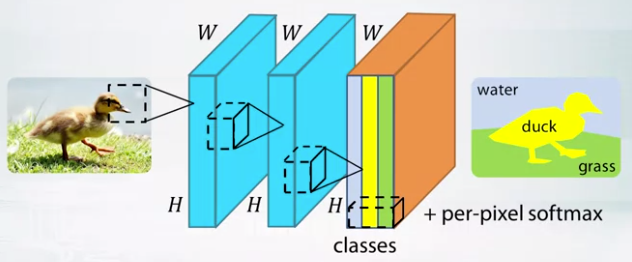
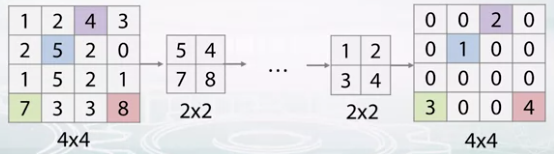
- If we use pooling layer, we should upsample.

- Nearest neighbor upsampling
- Fill with nearest neighbor values
- get a pixelated values.
- Max unpooling
- Remeber which element was max during pooling, and fill taht position during unpooling.
- Learnable unpooling
- Replace max pooling layer with convolutional layer
- Object classification + localization
- Find a bounding box of an object.
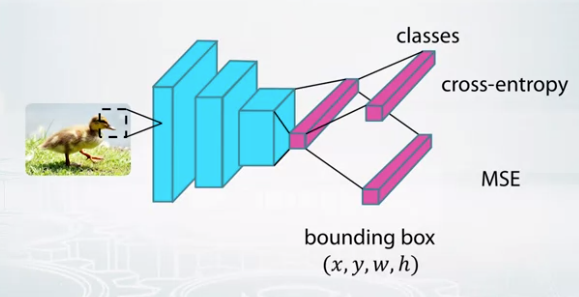
- Train classification layer with cross-entropy
- Reuse convolutional feature layer and train bounding box layer with MSE.
- Loss will be the sum of 2 losses.
Leave a comment